About Jeremy Castagno
Summary
I am an engineer and roboticist with expertise in GPU optimization and high-performance C++. I worked three years as a control systems engineer for Valero Energy specializing in safety systems. I later decided to pursue a PhD in robotics at the University of Michigan where I worked on urgent landing of drones. My dissertation proposed utilizing machine learning with data sources such as city maps, satellite images, and airborne LiDAR point clouds to create risk-evaluated emergency landing site databases, including building rooftops. I am currently a Senior Engineer at Ride with GPS where I develop multi-modal ML models and geospatial data pipelines.
My area of expertise is in GPU optimization, high-performance C++, machine learning, and real-time systems. I enjoy programming in C++, Python, CUDA, and using the Unreal Engine for simulations. Full CV or Shortened Resume.
Education
PhD, Robotics, University of Michigan (2021) MSc, Robotics, University of Michigan (2018) BSc, Chemical Engineering, Brigham Young University (2013) Minors: Computer Science and Mathematics
Work Highlights
Senior Engineer, Ride with GPS (2023-Present)
- Developed multi-modal ML model integrating satellite imagery and geospatial data for road surface analysis - Architected geospatial pipelines to refresh global environmental map layersAssistant Professor, Springfield College (2021-2023)
- Designed modern CS curriculum emphasizing systems programming and ML; returned to industry to pursue high-performance computingComputer Vision Engineer, Reliable Robotics (2022-2022)
- Developed visual positioning software for aircraft using traditional CV techniques - Performed model analysis showing high accuracy and >99% availability with real-world data - This was an exciting temporary position while on summer break from teachingResearch Assistant, A2SYS Lab at UMICH (2016-2021)
- Presented methods to incorporate rooftops as emergency landing sites for drones - Conducted multi-city analysis predicting roof shapes using ML with sensor fusion - Created state of the art polygon extraction library for both image and LiDAR data - Analysis and visualization of big data using Pandas, PostGIS, OpenMP/MPI, Docker, PyTorch, and WebGLComputer Vision/LiDAR Engineer, NASA Langley, (2018-2021)
- Conducted experiments for drone landing using cameras and LiDAR using OpenCV, PyTorch, CGAL, and ROS - Designed software architecture for online sensing with emergency landing directivesIndependent Contractor, Department of Defense, (2019-2020)
- Reviewed predictive maintenance methods for DOD assets and interviewed personnel - Designed multi-process software architecture for online sensing with emergency landing directivesProcess Control Engineer, Valero Energy, (2013-2015)
- Led advanced control system upgrade with a savings of 2 million/year - Conducted simulation, hardware-in-the-loop, and field testing of safety systemsResearch Assistant, PRISM Lab at BYU (2012-2013)
- Investigated optimal real-time parameter estimation for towed cable systems - Programmed MATLAB and C++ interfaces for benchmark laboratory systemsProject Highlights
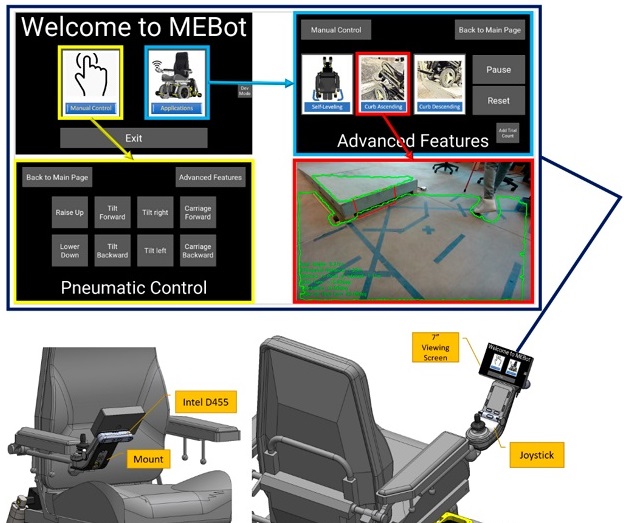
Autonomous Wheelchair
Curb Detection
A Curb Recognition and Negotiation (CRN) system is developed for an autonomous wheel chair to approach and mount curbs.
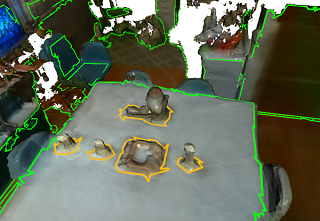
Polylidar3D
Polygons from 3D Data
Non-convex polygon extraction from 3D point clouds or meshes. Polygons represent flat surfaces in an environment (green), while interior holes (orange) represent obstacles on said surfaces.
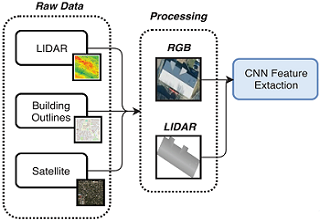
Roof Shape Classification
Multimodal data fusion
Satellite images and LiDAR data are use as input to a neural network to predict roof shape. A diverse annotated roof image dataset for small to large urban cities is created and used to evaluate our model.

Urgent Landing
UAS Rooftop Landing
Offline construction of a landing site database which is risk evaluated for people and property. Flat roofs are identified from LiDAR and image data and then processed to extract obstacle-free surface(s) for landing. We use a multi-goal planner which chooses a Pareto Optimal landing site.
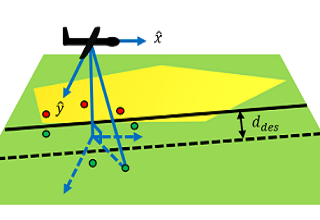
Wildfire Tracking
Fire boundary estimation
Novel methods for autonomously tracking and estimating the boundary of a fire with a team of drones. Combines computational geometry and deep learning. 1st prize in AI Swarm and Search Challenge.
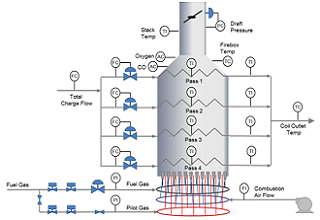
Gas-fired Heaters
Safety Systems
Safety Interlock Systems (SIS) play a vital role in ensuring the operability and safety of process units. I lead the SIS design and verification through factory acceptance tests (FAT) and site acceptance tests (SAT) of 4 heaters.
Media and Awards
Amazon re:MARS
Invited Speaker
Presented work on urgent landing site identification for small UAS in urban cities. Demonstrated AI/ML predicting roof shapes and Polylidar3D extracting landing sites of flat rooftops.

Swarm and Search AI
1st Prize Winner
National DOD sponsored competition for creating intelligent algorithms for controlling a group of drones in tracking and estimating a wildfire boundary. We took first prize ($27,000) and won the innovation award.

Into the Dataverse
1st Prize Winner
Joint Artificial Intelligence Center and NSIN sponsored a 3-day competition. We presented methods for recording maintenance logs with an AI-enabling user interface. Awarded $15,000 contract.

Awarded by First Sea Lord
HMS Queen Elizabeth
Received Royal treatment as guests on board the HMS Queen Elizabeth on Nov. 20 2019. Recognized as winners of the “Swarm and Search AI Challenge: 2019 Fire Hack.” Presented award by First Sea Lord of the Royal Navy.